研究方向
医疗微型机器人研究中心研究方向主要包括具身智能生物实验机器人系统、细胞操控微型机器人、体内介入磁控机器人系统以及基于AI引导的自动化控制系统。部分已取得成果如下:
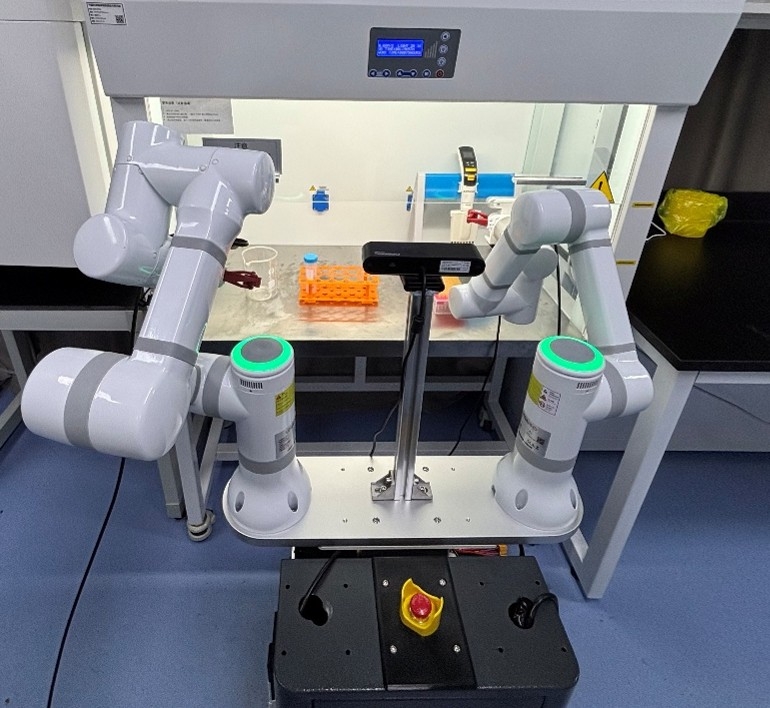
一、具身智能生物实验机器人系统:
具身智能生物实验机器人基于双臂协同与智能感知决策的全自主实验平台,解决传统生物实验依赖人工、效率低和重复性不足的问题,实现实验流程自动化、标准化与高可靠执行。
二、细胞操控微型机器人
(1)皮牛级弹性多自由度微纳机器人。Nature Nanotechnology
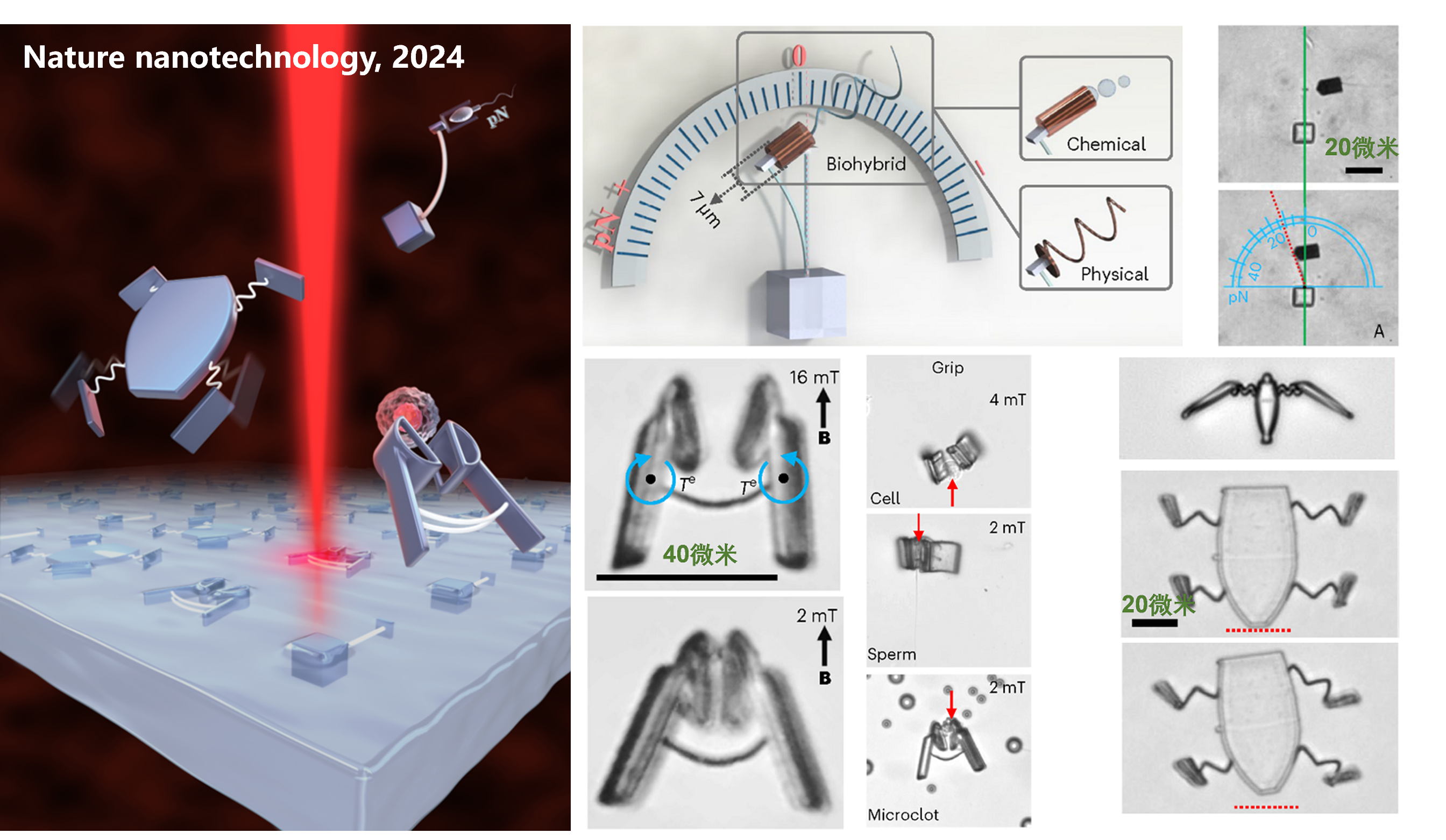
(2)精子机器人具弹性触手,当接触靶标位置时其触手可发生有效形变释放精子。ACS Nano
(3)流线型的精子机器人可利用其趋壁运动躲避强血流,从而逆血流方向运动。ACS Nano
(4)微纳机器的手性不对称运动于径向产生有效位移,从而可作搬运等应用。Angewandte Chemie
三、体内介入磁控机器人系统
• (1) 一种基于磁性螺旋形机器人的微机器人系统。Nature Communications
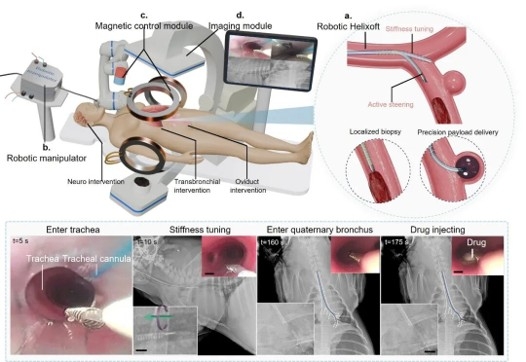
• (2) 一种可在输卵管中实时切换运动模态的软体微型机器人。ACS Nano
• (3) 一种集成了原位生物力学感知与力反馈控制于一体的磁性软体机器人导管系统。Biosensors and Bioelectronics
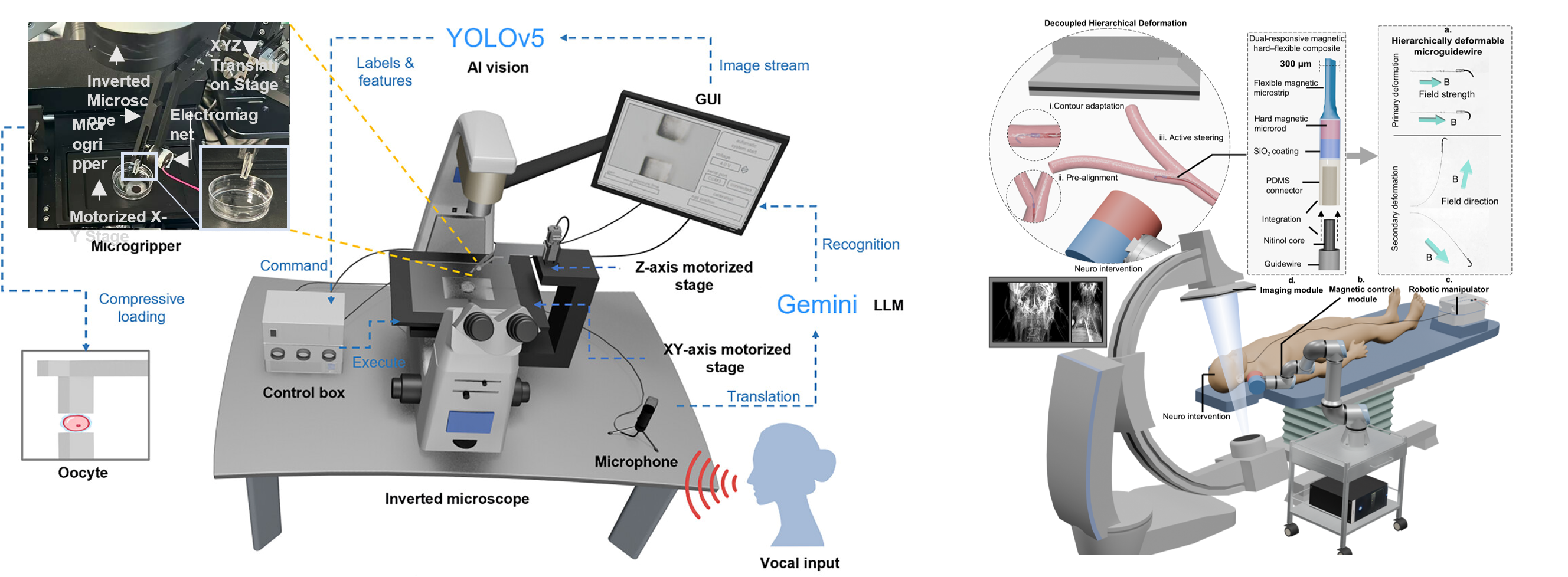
四、基于AI引导的自动化控制系统
(1)基于AI引导的卵母细胞质量自动化评估系统。Small Methods
(2)将自动化磁控系统与介入器械相结合,赋予血管内智能多模变形能力,为复杂血管介入提供了自适应转向技术范式。